An engine manufacturer was looking for ways to improve on a labor-intensive cylinder bore measurement, requiring twelve surface finish traces and a crosshatch measurement inside each cylinder bore. Digital Metrology teamed up with Indiana-based Tempest Tool to develop a robotically-controlled production measurement system, and in the end even incorporated a second measurement into the same operation.
System development began with a robot-mounted tooling head that incorporates four, off-the-shelf roughness gauges, enabling simultaneous measurements inside the bore. The robot automatically moves the measurement head to complete measurements at three vertical locations inside each bore, for a total of twelve measurements, before moving automatically to the next bore. Results are summarized in tabular format operator can also view the individual profile graphs with a click of the mouse. Custom measurement or re-measurement tasks are as simple as clicking the desired location(s) and hitting the “run” button.
The robotic system has reduced measurement cycle time from 2 hours to under 30 minutes, while improving measurement location repeatability and freeing an operator from a monotonous measurement task.
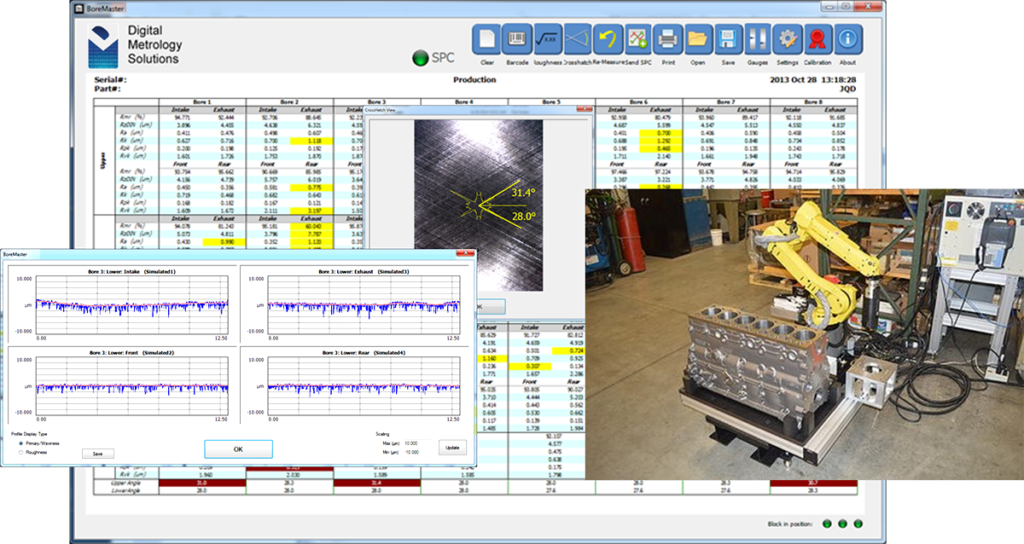
The screenshot above shows the results overview table and crosshatch measurement image. The insets show measurement results for one set of four roughness measurements on the left, and an image of the robot and hardware on the right.
Here is a video of the system in action (Courtesy of Tempest Tool).
Created in collaboration with Tempest Tool